I've been puzzling for a long time how one would create sequential state machines in hal logic, and it finally dawned on me that you guys are doing that in things like pyvcp or axis. It would be nice if hal itself could have a good mechanism for defining states and state transition logic. Have I missed something?
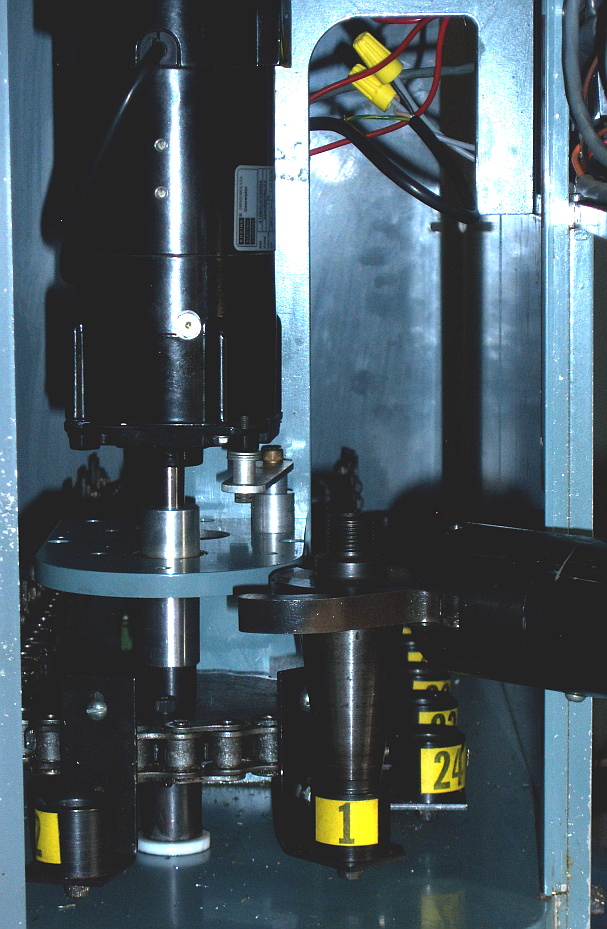
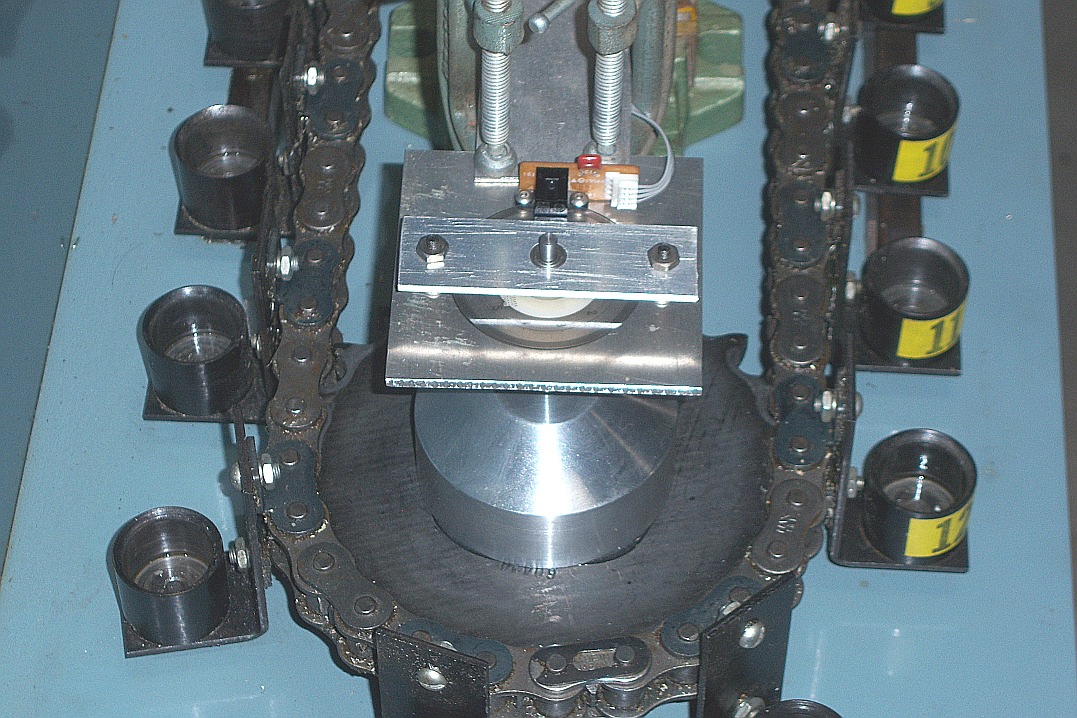
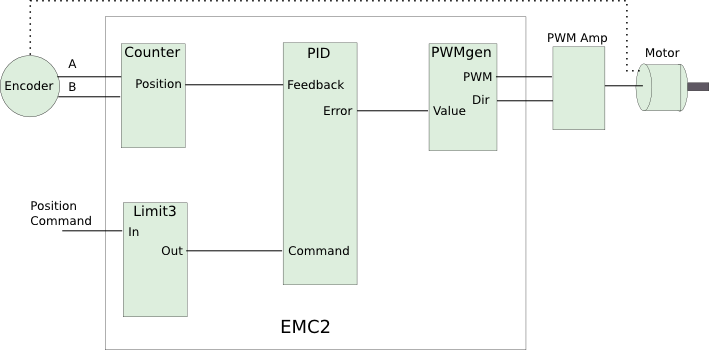
-- Ralph ________________________________________ From: Kirk Wallace [[email protected]] Sent: Monday, June 01, 2015 7:49 AM To: [email protected] Subject: Re: [Emc-users] Classic Ladder running motor x mm. On 06/01/2015 04:50 AM, andy pugh wrote: > On 1 June 2015 at 04:33, Sven Wesley <[email protected]> wrote: >> Trying to figure out if there's any way to run a motor, either a stepper or >> servo, a given distance with classic ladder _without_ having a XYZ >> configuration. > > > Yes, this is fairly easy. The stepgen and PID components don't care > where their setpoints come from. If the motors only need to run at one > speed you can simply set the stepgen max_speed and max_acc pins to the > required values. However typically you would use the limit3 HAL > component to supply position, velocity and acceleration limits for the > motor. > > Rather than CL I would consider making a simple Glade UI to supply the > setpoints and control the sequencing but if the controls are all > physical switches you could even run the PC without a display and > provide all operate feedback vial lamps and buttons. This could be a start to a HAL controller: http://www.wallacecompany.com/machine_shop/LinuxCNC/gvcpDRO/ Just plug in the appropriate HAL components, such as LimitX and/or PID and others. The sequencing and logic can be done in Python. I used a similar setup (LimitX) except embedded in axis for my mill tool carousel: http://www.wallacecompany.com/machine_shop/Shizuoka/100_1136-1a.jpg http://www.wallacecompany.com/machine_shop/Shizuoka/100_1133-1a.JPG http://www.wallacecompany.com/machine_shop/Shizuoka/Carousel_Overview-1a.png I did some sequencing in an automated tester: http://wallacecompany.com/tmp/Screenshot_lathe_bd_test.png First pass: http://wallacecompany.com/tmp/auto_test_ui/ which used a comp similar to my lathe turret comp. http://www.wallacecompany.com/cnc_lathe/HNC/emc2/turret.comp > To set up such a "HAL-only" config you need a HAL file that starts the > threads and loads CL and/or a Python GUI. You don't need to load > motmod and there is no need for a G-code interpreter. > One difference between such a HAL-only config HAL file and a typical > one is that it needs to explicitly start the realtime threads with the > "start" command. > > You can then create an icon that runs halrun -f myhalfile.hal for easy > launching. > > loadrt threads period1=50000 period2=1000000 name1=base-thread > name2=servo-thread > loadrt stepgen step_type=0,0,0 > loadrt limit3 count=3 > addf stepgen.0.make-pulses base-thread > addf stepgen.0.capture-position servo-thread > ... > setp stepgen.0.step-length 4000 > ... > net limit3.0.out stepgen.0.position-cmd > setp limit3.0.min -100 > ... > loadrt classicladder ...... > .... > > start > -- Kirk Wallace http://www.wallacecompany.com/machine_shop/ http://www.wallacecompany.com/E45/ ------------------------------------------------------------------------------ _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users ------------------------------------------------------------------------------ _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}
{kind=link}
{kind=link}
{kind=link}